
Uma colaboração de pesquisa em IA liderada pelo professor da EPFL Alexander Mathis cria um modelo que fornece insights profundos sobre o movimento das mãos, o que é uma etapa essencial para o desenvolvimento de neuropróteses e tecnologias de reabilitação.
Na neurociência e na engenharia biomédica, modelar com precisão os movimentos complexos da mão humana tem sido um desafio significativo. Os modelos atuais muitas vezes lutam para capturar a intrincada interação entre os comandos motores do cérebro e as ações físicas dos músculos e tendões. Esta lacuna não só dificulta o progresso científico, mas também limita o desenvolvimento de neuropróteses eficazes destinadas a restaurar a função da mão para pessoas com perda de membros ou paralisia.
O professor da EPFL Alexander Mathis e sua equipe desenvolveram uma abordagem baseada em IA que avança significativamente nossa compreensão dessas funções motoras complexas. A equipe usou uma estratégia criativa de aprendizado de máquina que combinava aprendizado por reforço baseado em currículo com simulações biomecânicas detalhadas.
Estamos nos aprofundando nos princípios básicos do controle motor humano.
Alexandre Mathis
A pesquisa de Mathis apresenta um modelo detalhado, dinâmico e anatomicamente preciso do movimento da mão que se inspira diretamente na maneira como os humanos aprendem habilidades motoras complexas. Esta pesquisa não só ganhou o MyoChallenge na conferência NeurIPS em 2022, mas os resultados também foram publicados na revista Neurônio .
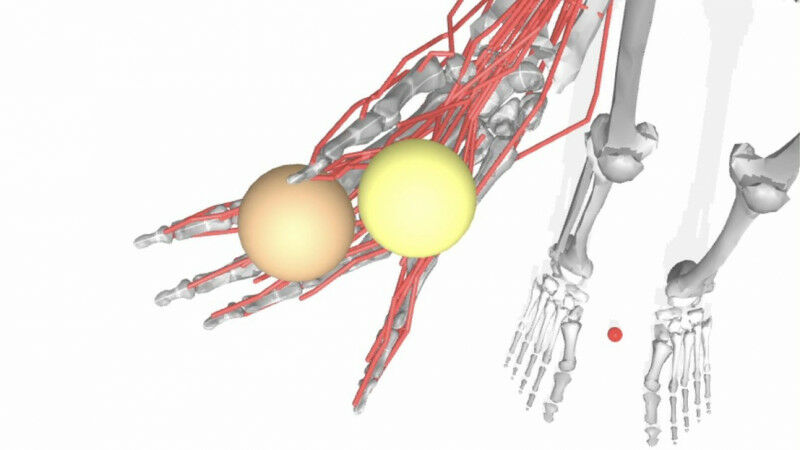
Controlando virtualmente bolas Baoding
“O que mais me entusiasma nesta pesquisa é que estamos mergulhando profundamente nos princípios fundamentais do controle motor humano – algo que tem sido um mistério há tanto tempo. Não estamos apenas construindo modelos; estamos descobrindo a mecânica fundamental de como o cérebro e os músculos trabalham juntos”, diz Mathis.
O desafio NeurIPS da Meta motivou a equipe da EPFL a encontrar uma nova abordagem para uma técnica de IA conhecida como aprendizagem por reforço. A tarefa era construir uma IA que manipulasse com precisão duas bolas Baoding – cada uma controlada por 39 músculos de maneira altamente coordenada. Esta tarefa aparentemente simples é extraordinariamente difícil de replicar virtualmente, dada a complexa dinâmica dos movimentos das mãos, incluindo a sincronização muscular e a manutenção do equilíbrio.
Neste ambiente altamente competitivo, três estudantes de pós-graduação – Alberto Chiappa do grupo de Alexander Mathis, Pablo Tano e Nisheet Patel do grupo de Alexandre Pouget da Universidade de Genebra – superaram os seus rivais por uma margem significativa. Seu modelo de IA alcançou 100% de sucesso na primeira fase da competição, superando o concorrente mais próximo. Mesmo na segunda fase mais desafiadora, o seu modelo mostrou a sua força em situações cada vez mais difíceis e manteve a liderança para vencer a competição.
Dividir as tarefas em partes menores – e repeti-las
“Para vencer, nos inspiramos na forma como os humanos aprendem habilidades sofisticadas em um processo conhecido como treinamento parte-para-todo nas ciências do esporte”, diz Mathis. Esta abordagem da parte para o todo inspirou o método de aprendizagem curricular utilizado no modelo de IA, onde a tarefa complexa de controlar os movimentos das mãos foi dividida em partes menores e gerenciáveis.
“Para superar as limitações dos modelos atuais de aprendizado de máquina, aplicamos um método chamado aprendizado curricular. Após 32 etapas e quase 400 horas de treinamento, treinamos com sucesso uma rede neural para controlar com precisão um modelo realista da mão humana”, diz Alberto Chiappa .
Uma das principais razões para o sucesso do modelo é a sua capacidade de reconhecer e usar padrões de movimento básicos e repetíveis, conhecidos como primitivos motores. Numa reviravolta científica emocionante, esta abordagem ao comportamento de aprendizagem poderia informar a neurociência sobre o papel do cérebro na determinação de como os primitivos motores são aprendidos a dominar novas tarefas. Esta intrincada interação entre o cérebro e a manipulação muscular mostra o quão desafiador pode ser construir máquinas e próteses que realmente imitem o movimento humano.
“Você precisa de um grande grau de movimento e de um modelo que se assemelhe a um cérebro humano para realizar uma variedade de tarefas cotidianas. Mesmo que cada tarefa possa ser dividida em partes menores, cada tarefa precisa de um conjunto diferente desses primitivos motores para ser bem executada. “, diz Mathis.
Aproveite a IA na exploração e compreensão de sistemas biológicos
Esta investigação dá-nos uma base científica sólida que reforça a nossa estratégia.
Silvestro Micera
Silvestro Micera, pesquisador líder em neuropróteses no Instituto Neuro X da EPFL e colaborador de Mathis, destaca a importância crítica desta pesquisa para a compreensão do potencial futuro e dos limites atuais até mesmo das próteses mais avançadas. “O que realmente sentimos falta agora é uma compreensão mais profunda de como o movimento dos dedos e o controle motor de preensão são alcançados. Este trabalho vai exatamente nesta direção muito importante”, observa Micera. “Sabemos a importância de ligar a prótese ao sistema nervoso e esta investigação dá-nos uma base científica sólida que reforça a nossa estratégia”.
Abigail Ingster, estudante de bacharelado na época da competição e ganhadora da bolsa Summer in the Lab da EPFL, desempenhou um papel fundamental na análise da política. Com sua bolsa de estudos apoiando a experiência prática de pesquisa, Abigail trabalhou em estreita colaboração com o candidato ao doutorado Alberto Chiappa e o Prof. Mathis para se aprofundar no intrincado funcionamento da política aprendida da IA.
Referências
Alberto Silvio Chiappa, Pablo Tano+, Nisheet Patel, Abigaïl Ingster, Alexandre Pouget e Alexander Mathis. Adquirir habilidades musculoesqueléticas com aprendizagem por reforço baseada em currículo. Neurônio (2024). DOI: 10.1016/j.neuron.2024.09.002